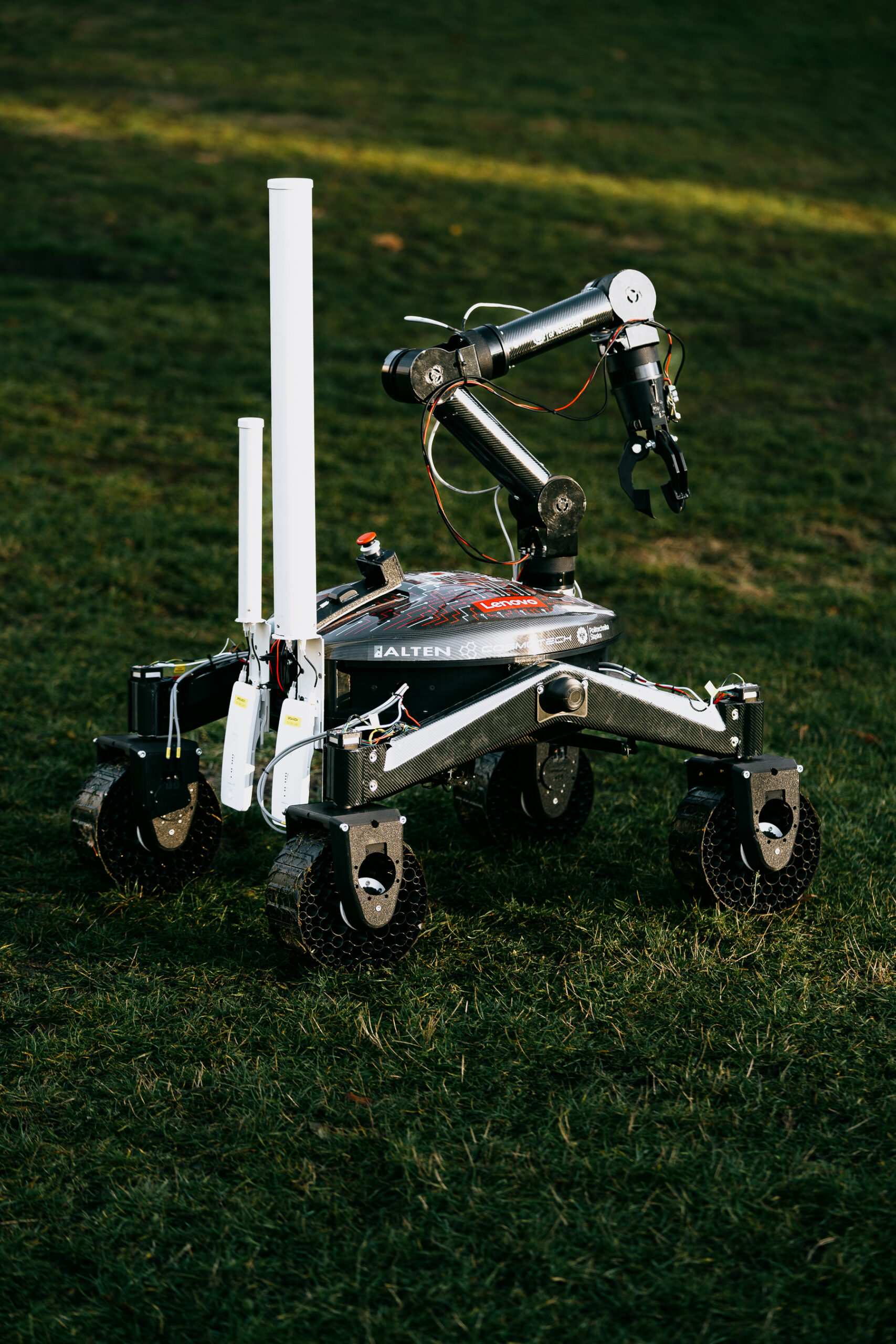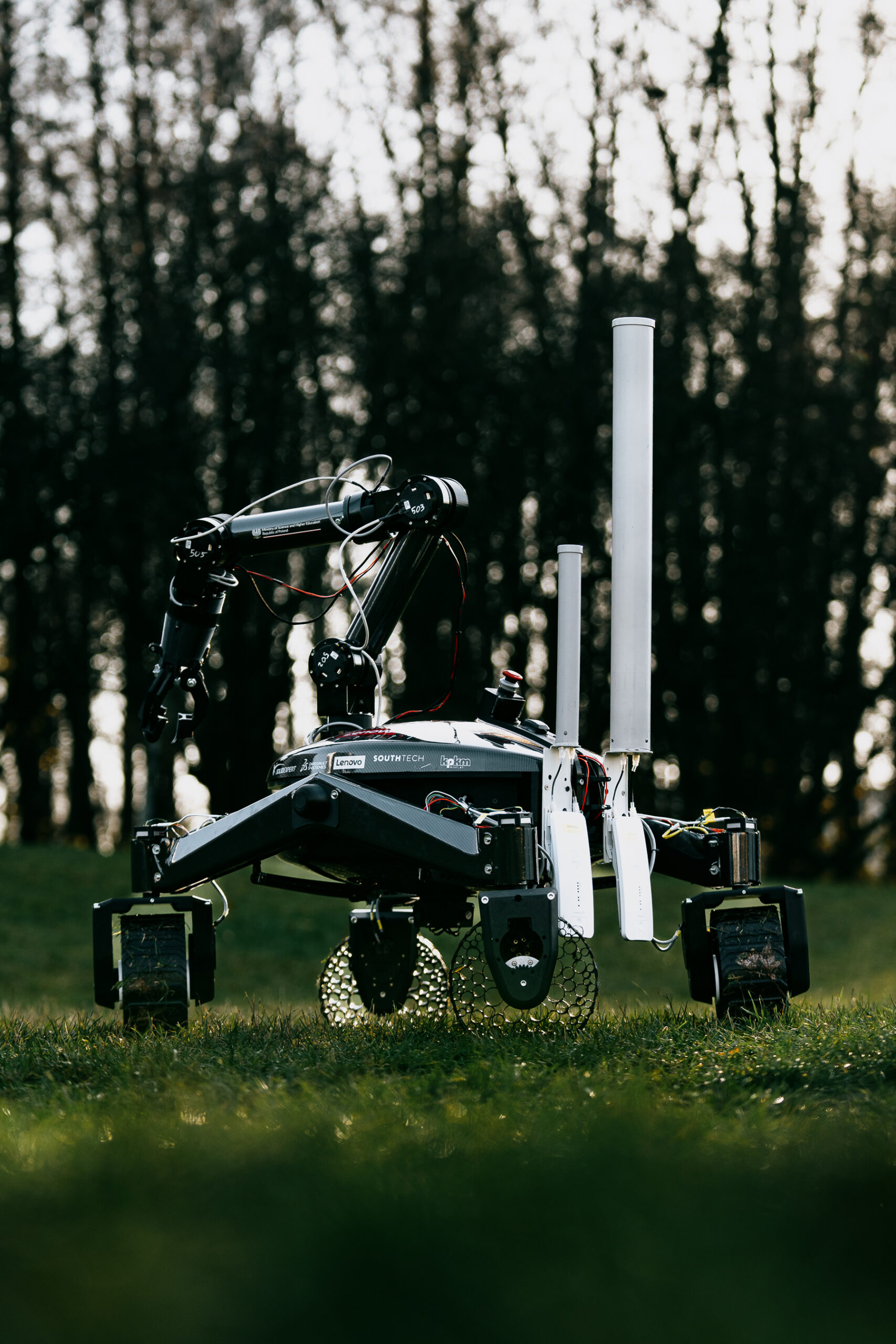





Phoenix III

840 x 850 x 500 mm

18 kg

120 min

3 m/s

Układ jezdny: czterokołowy układ jezdny połączony jest za pośrednictwem układu zawieszenia typu rocker z dwiema belkami różnicującymi. Układ ten pozwala na płynne pokonywanie przeszkód terenowych utrzymując korpus w stałym położeniu względem pokonywanego terenu. Każde z czterech kół posiada niezależny układ napędowy składający się z silnika BLDC do napędzania koła oraz motoreduktora służącego do obrotu koła w osi skręcania. Układ taki umożliwia zaimplementowanie wielu trybów jazdy, zapewniając dużą elastyczność platformy w kontekście zdolności jezdnych.

Ramię robotyczne: główny układ służący do interakcji łazika z otoczeniem. Opracowane przez zespół ramię robotyczne wyposażone jest w sześć stopni swobody, zapewniających dużą zręczność ramienia. Każdy stopień swobody wykorzystuje precyzyjny silnik BLDC, co zapewnia precyzję w sterowaniu. Ramię zakończone jest chwytakiem umożliwiającym precyzyjne manipulowanie przełącznikami czy pokrętłami, jak również umożliwiający pobieranie próbek gleby w trakcie realizacji misji eksploracyjnych w trakcie zawodów.
Układ komunikacyji: stanowi istotny układ w trakcie realizacji misji. Za pośrednictwem układu komunikacji operatorzy znajdujący się w centrum dowodzenia komunikują się z platformą na odległość. Opracowany układ komunikacji bazuje na wykorzystaniu standardu Wi-Fi do obsługi wymiany danych do i z platformy. W celu zapewnienia jak najlepszej przepustowości zastosowano podwójny układ wykorzystujący częstotliwość transmisji 2,4 GHz oraz 5,0 GHz. W zależności od siły sygnału system automatycznie decyduje, która częstotliwość jest wiodąca. Niezależnie od tego wszystkie dane są ciągle przesyłane oboma kanałami w celu zapewnienia redundancji i zwiększenia niezawodności sterowania.
Układ obliczeniowy: stanowi jeden z najistotniejszych elementów platformy Phoenix III służący za realizacje wszystkich działań. Zastosowane układy obliczeniowe zostały opracowane według architektury rozproszonej, w ramach której główna jednostka obliczeniowa odpowiedzialna jest za przetwarzanie danych i generowanie poleceń dla układów niższego poziomu. Niższy poziom obsługiwany jest przez niezależne układy obliczeniowe bazujące na jednopłytkowych kontrolerach. Dodatkowo główna jednostka obliczeniowa odpowiedzialna jest za komunikację z operatorami oraz akwizycje i przetwarzanie danych z układu wizyjnego.

Zakwalifikowanie się i zajecie 9. miejsca w międzynarodowych zawodach Anatolian Rover Challenge 2023
Zakwalifikowanie się i zajecie 8. miejsca w międzynarodowych zawodach 2024 Canadian International Rover Challenge - Summer Competition
Zakwalifikowanie się i zajecie 6. miejsca w międzynarodowych zawodach 2025 Canadian International Rover Challenge - Summer Competition

Stworzenie na bazie łazika 4 projektów inżynierskich z Automatyki i Robotyki oraz Informatyki