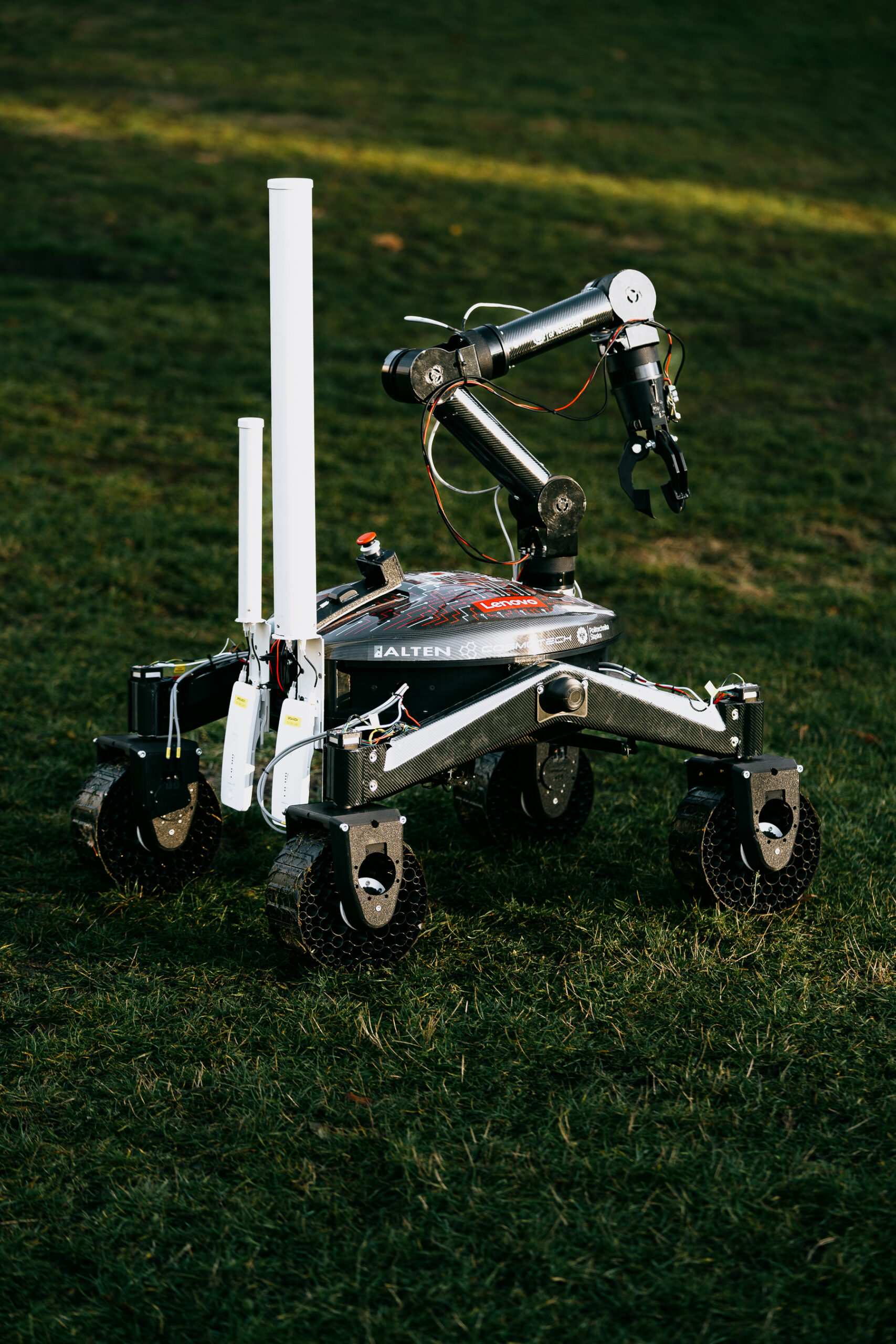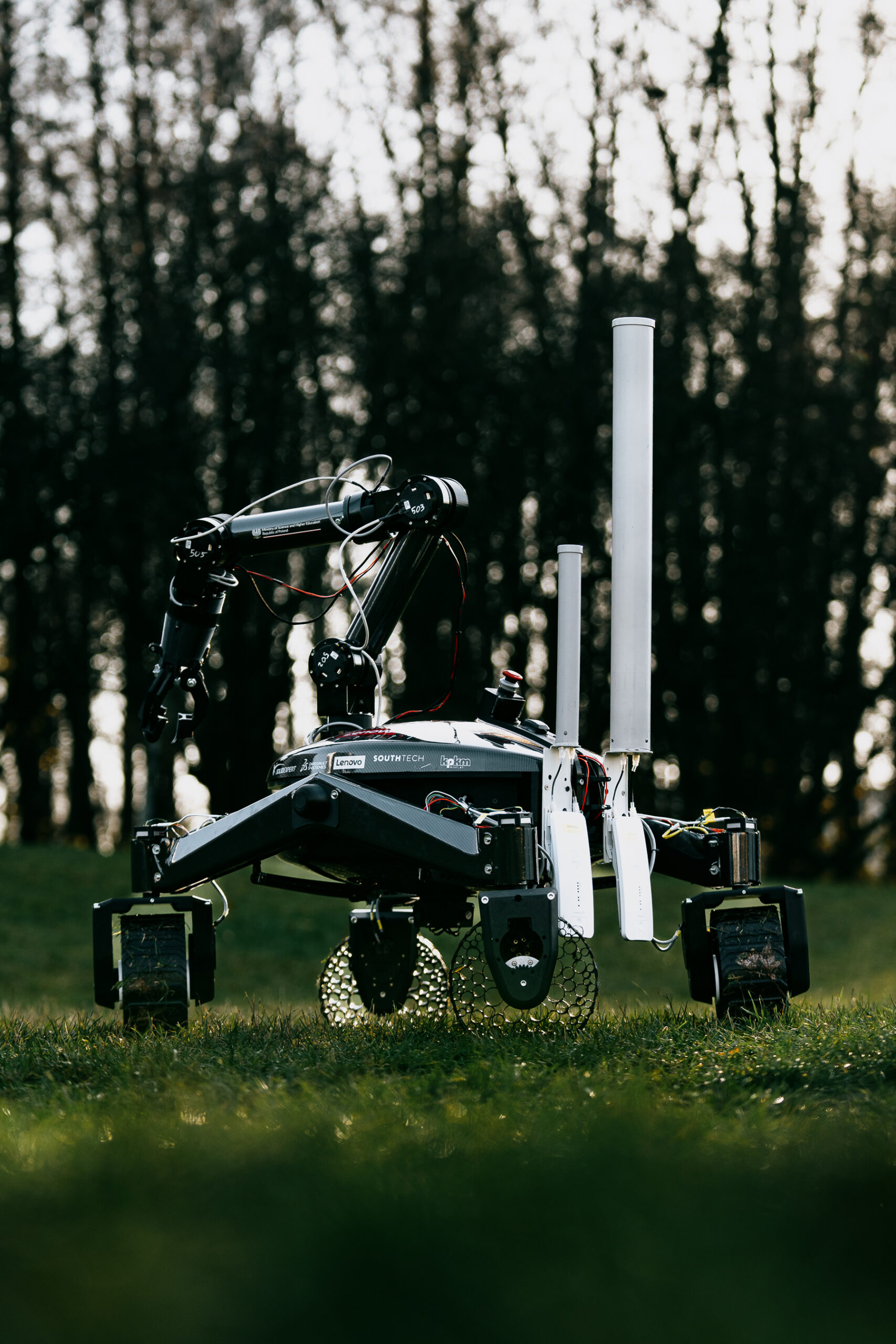




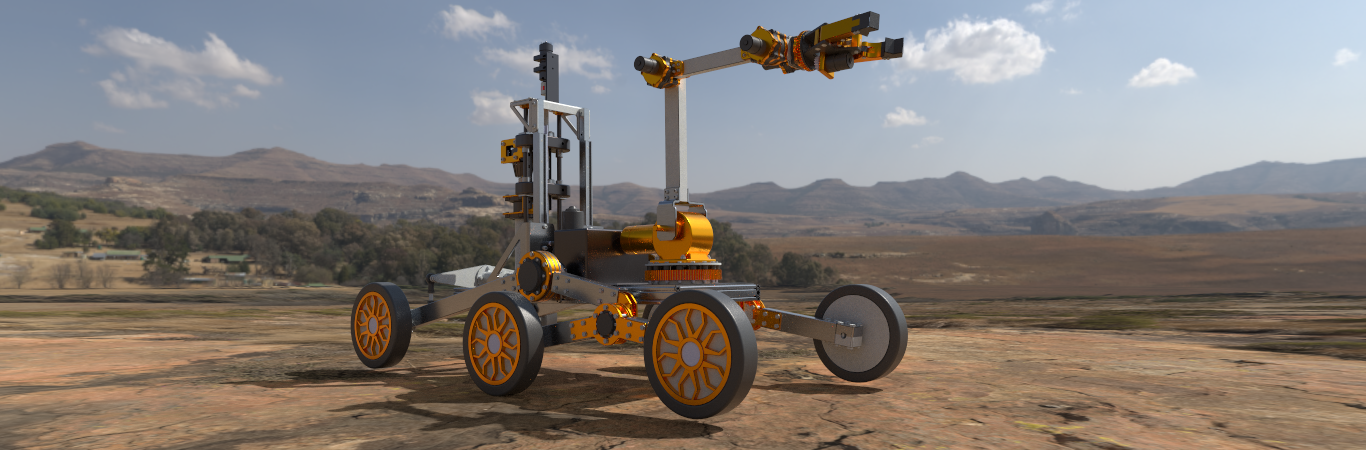
Phoenix II

1260 x 730 x 415 mm
Długość, Szerokość i Wysokość

27 kg
Masa układu jezdnego

45 min
Czas pracy

2 m/s
Prędkość pracy

Zakwalifikowanie się i zajecie 24. miejsca w międzynarodowych zawodach European Rover Challenge 2019

Opracowanie i opatentowanie elementów układu pobierania próbek gleby, chronionych Polskim Patentem nr xxxxxx