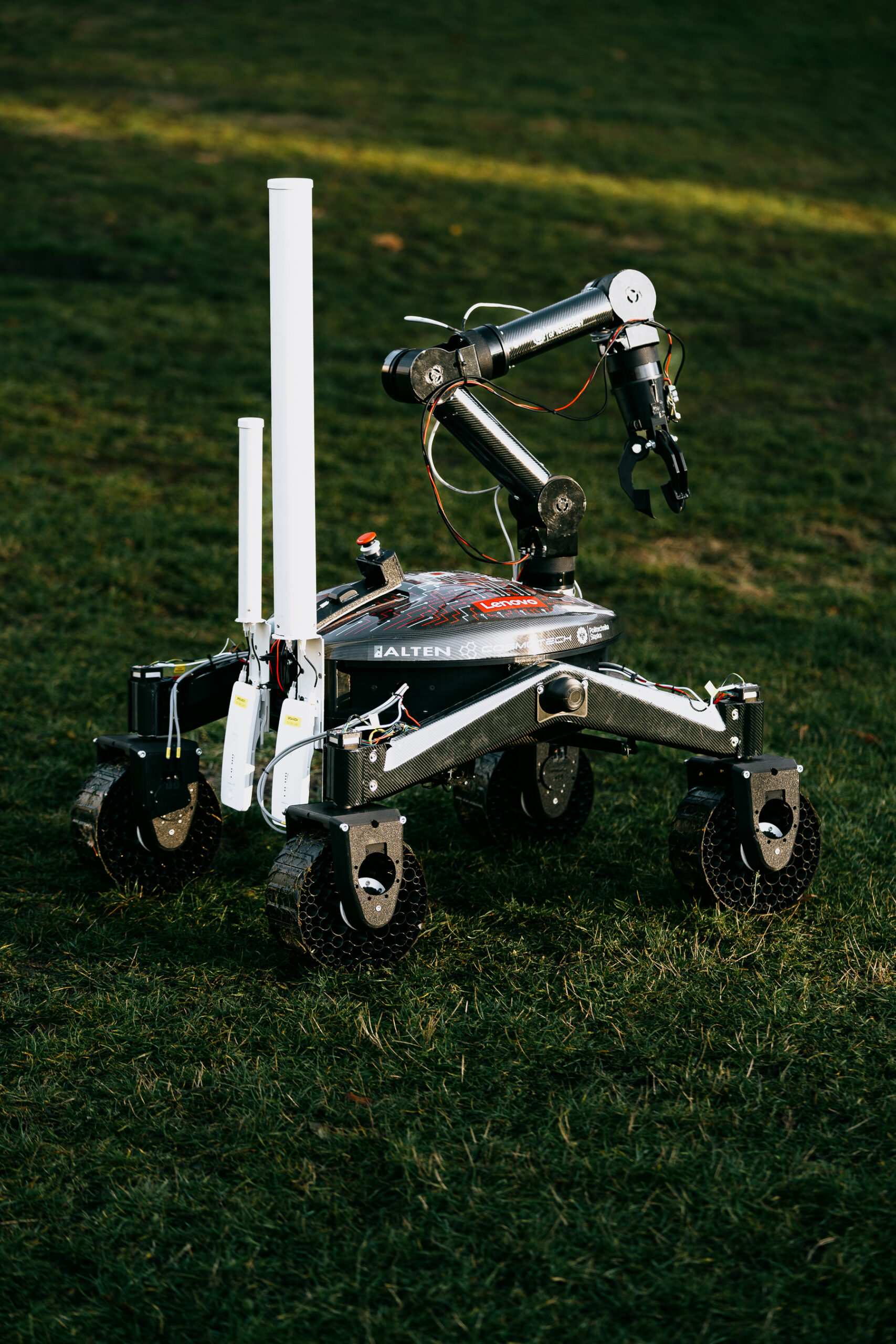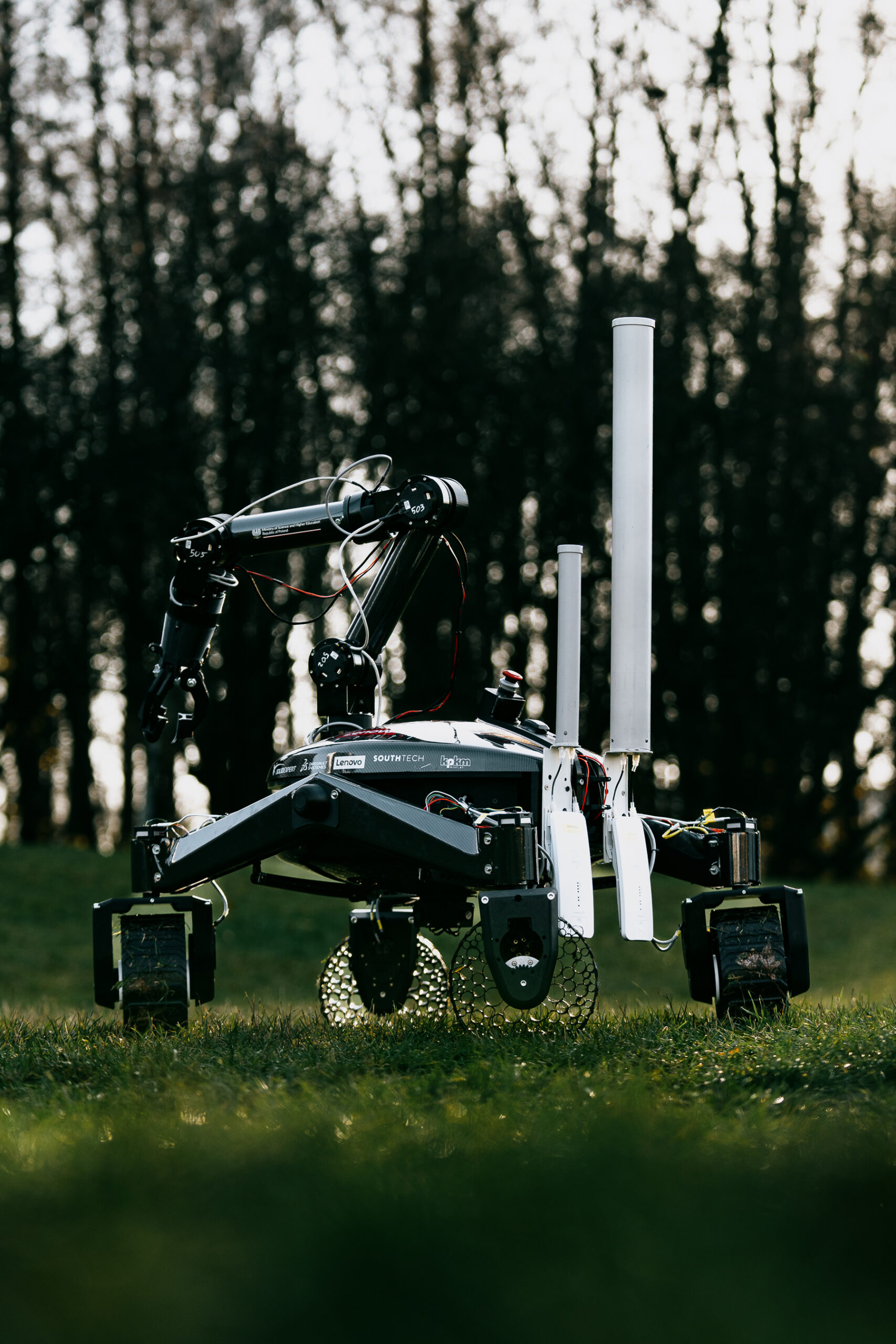





Phoenix III

840 x 850 x 500 mm

18 kg

120 min

3 m/s

Mobility system: the four-wheel running gear is connected via a rocker suspension system with two differential beams. This system allows the vehicle to smoothly traverse off-road obstacles by keeping the body in a constant position relative to the terrain being traversed. Each of the four wheels has an independent drive system consisting of a BLDC motor to drive the wheel and a geared motor used to rotate the wheel in the turning axis. Such a system makes it possible to implement multiple driving modes, providing great flexibility for the platform in terms of driving capability.

Robotic arm: the main system for the rover's interaction with the environment. Developed by the team, the robotic arm is equipped with six degrees of freedom, ensuring high dexterity of the arm. Each degree of freedom uses a high-precision BLDC motor for precise control. The arm ends with a gripper that allows precise manipulation of switches or knobs, as well as enabling soil sampling during exploration missions in the competition.
Communication system: is an important system during mission execution. Through the communication system, operators located in the command center communicate with the platform remotely. The developed communication system is based on the use of the Wi-Fi standard to support data exchange to and from the platform. A dual chip using 2.4 GHz and 5.0 GHz transmission frequencies was used to ensure the best possible throughput. Depending on the signal strength, the system automatically decides which frequency is leading. Regardless, all data is continuously transmitted through both channels to ensure redundancy and increase control reliability.
Computing system: it is one of the most essential elements of the Phoenix III platform for carrying out all activities. The computing circuits used were developed according to a distributed architecture, in which the main computing unit is responsible for processing data and generating commands for lower-level circuits. The lower level is handled by independent computing systems based on single-board controllers. In addition, the main computing unit is responsible for communication with operators and acquisition and processing of data from the vision system.

Qualification and 9th place in the international competition Anatolian Rover Challenge 2023
Qualifying and placing 8th in the 2024 Canadian International Rover Challenge - Summer Competition

Development of 4 engineering projects from Automation and Robotics and Computer Science based on the rover